Planen var at vi ikke bruker så lang tid i den ytterste banen, og starter å manøvrere oss nærmere med en gang. Dette gjøres ved å utnytte prinsippet bak sentripetalakselerasjon i sirkelbevegelse, som er gitt som
\(F = \frac{mv^2}{r} \Rightarrow r = \frac{v^2}{a} \) der akselerasjonen kommer fra kreftene som virker på raketten fra planeten. Det vi er ute etter, og bruker, er forholdet mellom akselerasjonen og farten, vi ser at når farten går ned så vil avstanden, radiusen i en sirkulær bane, bli mindre. Fra newtons gravitasjonslov vet vi at kreftene som virker på et objekt blir større jo nærmere to legemer er, så når avstanden går ned så vil akselerasjonen, kreftene, bli større. Dette vil igjen gjøre at avstanden blir mindre. Farten har i dette tilfelle mye større påvirkning enn det akselerasjonen har, som betyr at vi nesten kan se bort fra akselerasjonen i utrykket over.
Ved å redusere farten til raketten så vil avstanden også bli mindre. Dette gjør vi ved å bruke thrusteren i motsatt retning av vår bevegelse. Dette gjør at vi får en mer elliptisk bane, som lar oss fly nærmere enn i den sirkulære banen. Når vi er på det nærmeste bremser vi igjen slik vi gjorde får å komme inn i bane første gangen, og forhåpentligvis ende opp i en tilnærmet sirkulær bane nærmere overflaten. Denne metoden kalles for Hohmann transfer orbit, som kom naturlig uten å ha planlagt for å bruke den metoden i forkant. Dette gjøres i så tre ganger for etter å ha testet litt rundt så vi at det ville spare litt mer drivstoff enn å utføre en større manøver.
Måten vi simulerte for tiden og hvor mye vi måtte bremse var å ta start posisjonen til raketten, så prøvde vi ulike verdier for hastigheten vi måtte redusere med for å komme nærmere. Etter dette brukte vi euler cromer, og valgte et passende antall steg ved å plotte bevegelsen til raketten og se når den var på sitt nærmeste. Størrelsen på stegene var på 1 sekund pr steg, på grunn av tyngdekraften som ville virke på raketten fra planeten. Større enn 1 sekund og det kunne føre til unøyaktighet og usikkerhet som er noe som er fokuset denne gangen, fordi vi gjør dette flere ganger. Når vi hadde funnet tidspunktet den var på sitt nærmeste brukte vi de samme funksjonene som fra da vi gikk inn i bane første gangen, for å oppnå en tilnærmet sirkulær bane.
Nå som vi er nærme nok overflaten kan vi begynne å se etter potensielle landingsplasser. Vi har nå noen begrensninger, på grunn av mengde drivstoff som er igjen. Så selv om vi nå kunne starte å bevege oss i 3 dimensjoner så er det uaktuelt for oss, ved mindre vi bare ønsker å gå i bane rundt planeten. Vi har altså ikke nok drivstoff til å bevege oss annet enn i det planet vi allerede beveger oss i. Vi kunne ha prøvd å skyte opp på nytt med mer drivstoff om bord, men dette ville maksimalt ha gitt oss rundt 40 kg mer drivstoff enn det vi allerede har, så det er også uaktuelt. Så på grunn av disse begrensingene ble matematikken videre også en god del enklere.
For å undersøke overflaten må vi vite hvor vi er i forhold til steder vi kan lande. Vi trenger et referansepunkt så vi vet hvor de ulike geologiske strukturene på overflaten. I og med at vi ikke har noen spesifikk referansepunkt som vi kan sette som 0 punkt valgte vi å si at der vi starter fra, blir vårt referansepunkt, som så må bli oppdatert som en funksjon av tiden og vår bevegelse. Vi beveger oss med klokken, og planeten roterer med en viss vinkelfart, som er \(2\pi\) delt på rotasjonstiden i sekunder, mot klokken. Vi ønsker å bruke vinkler, som lar oss vite hvor vi og landingsplasser er i forhold til referansepunktet, som vil si overflaten generelt.
Vi simulerte så bevegelsen våres ut fra det tidligere referansesystemet som vi har brukt så langt, men at vi også holdt oversikt over vinkelen våres i forhold til referansepunktet. Grunnen til dette er at når vi skal lande så vil det være mye lettere å bruke vinkelen til referansepunktet, enn å skulle knote med flere referansesystemer som er basert på tidligere beregninger og metoder, som også ikke kan bli brukt visuelt. Det å kunne si hvor vi er visuelt vil kunne gjøre ting mye lettere nå som vi er så nærme.
Selve simuleringen var først vanlig euler cromer, hvor vi flyttet raketten, så fant vi vinkelen i forhold til referansepunktet (gjennom sentrum av planeten i tilfelle det var uklart), så oppdaterte vi posisjonen til referansepunktet ved å rotere planeten med en størrelse som var avhengig av tidssteget. Her var tidssteget lik 1 sekund, igjen for å redusere usikkerheten. Antall tidssteg som ble brukt var bestemt ved tiden det ville ta å gå i bane en hel gang rundt planeten, uavhengig av hvor referansepunktet var. Tiden det tok ble på 15540 sekunder eller 4.3 timer, som ble funnet ved å kjøre simulasjonen et par ganger og rett og slett se når raketten hadde gått en hel runde. Under kan man også se at raketten faktisk går en hel runde ved å se på hvor linjen som dannes av dag og natt siden av planeten. Det er 1000 frames/bilder i videoen under.
Vi valgte å ta opptak/video under hele runden for å kunne se etter potensielle steder å lande. Etter å ha sett på det litt kom vi fram til følgende steder som ble tatt mellom bildene. Vi valgte å se etter steder som skilte seg fra det tilsynelatende flate områdene på planeten som det er mest av, fordi vi vet ikke helt om det er vann eller om det bare er is. Så tanken var at det er unaturlig at det er så store områder som er dekket av et helt flatt område om det ikke er noe flytende. Det er også vanskelig å si om det som ser ut som landmasser er store groper eller faktisk landmasser. Så vi konkluderte med at det sikreste var å prøve å lande i en av de potensielle gropene/landmassene.
| Start | Stopp | Vinkel |
|---|---|---|
| 39 | 72 | \(343.4^o\ til\ 329.4^o \) |
| 587 | 605 | \(114.3^o\ til\ 106.9^o \) |
| 610 | 622 | \(104.9^o\ til\ 100^o\) |
| 693 | 722 | \(71.2^o\ til\ 59.4^o\) |
| 766 | 782 | \(41.4^o\ til\ 34.9^o \) |
| 903 | 940 | \(345^o\ til\ 329.6^o\) |
Vinkelen ble så funnet ved å få en funksjon for korresponderende vinkel til et gitt bilde som gir følgende funksjon.
\(angle(f) = f \cdot \frac{N_{dt}}{N_f}\)
her er \(f\) frames, eller hvilken verdi som vises i venstre hjørne, \(N_{dt}\) er antall tidssteg og \(N_f\) er antall bilder i videoen totalt. Fra tabellen ovenfor kan vi se for den første og siste vinkelparet at dette er på samme sted, som vil si at vi kan velge hvilke vinkler vi skal bruke. Her valgte vi min max verdiene som gir oss området \(345^o \ til\ 329.4^o\).
Dette gir oss totalt 5 potensielle steder å lande, som er vist i bildet under.
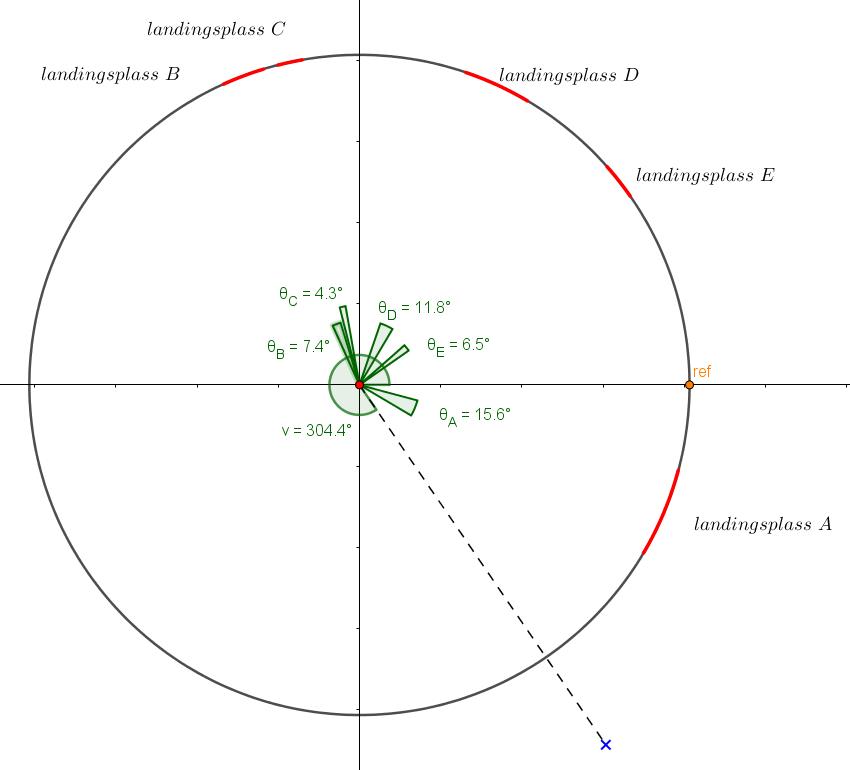
Ut fra dette ser det ut til at landingsplass A, B, C og D er de beste å prøve seg på, på grunn av størrelsen men også hvor tett noen av dem er. Større område gir mer rom for feil, og bommer vi på B kan man bruke C som en sekundær plan.